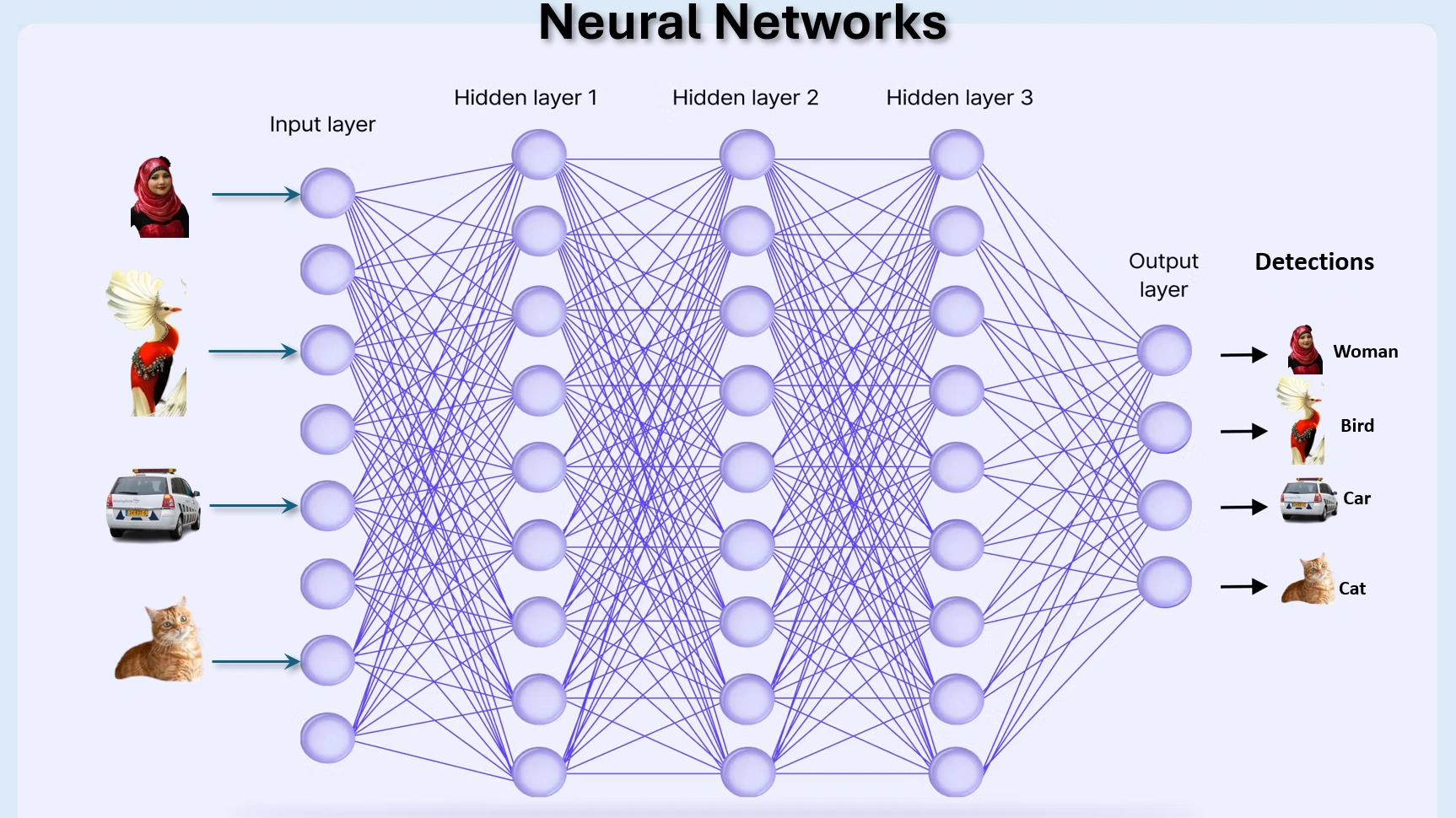
The following activities reflect my strong and consistent engagement in the
fields of Neural Networks, Machine Learning, and Deep Learning. The work spans practical
implementation, experimentation, and application of AI methods to real-world problems, contributing
to both foundational understanding and advanced innovation.
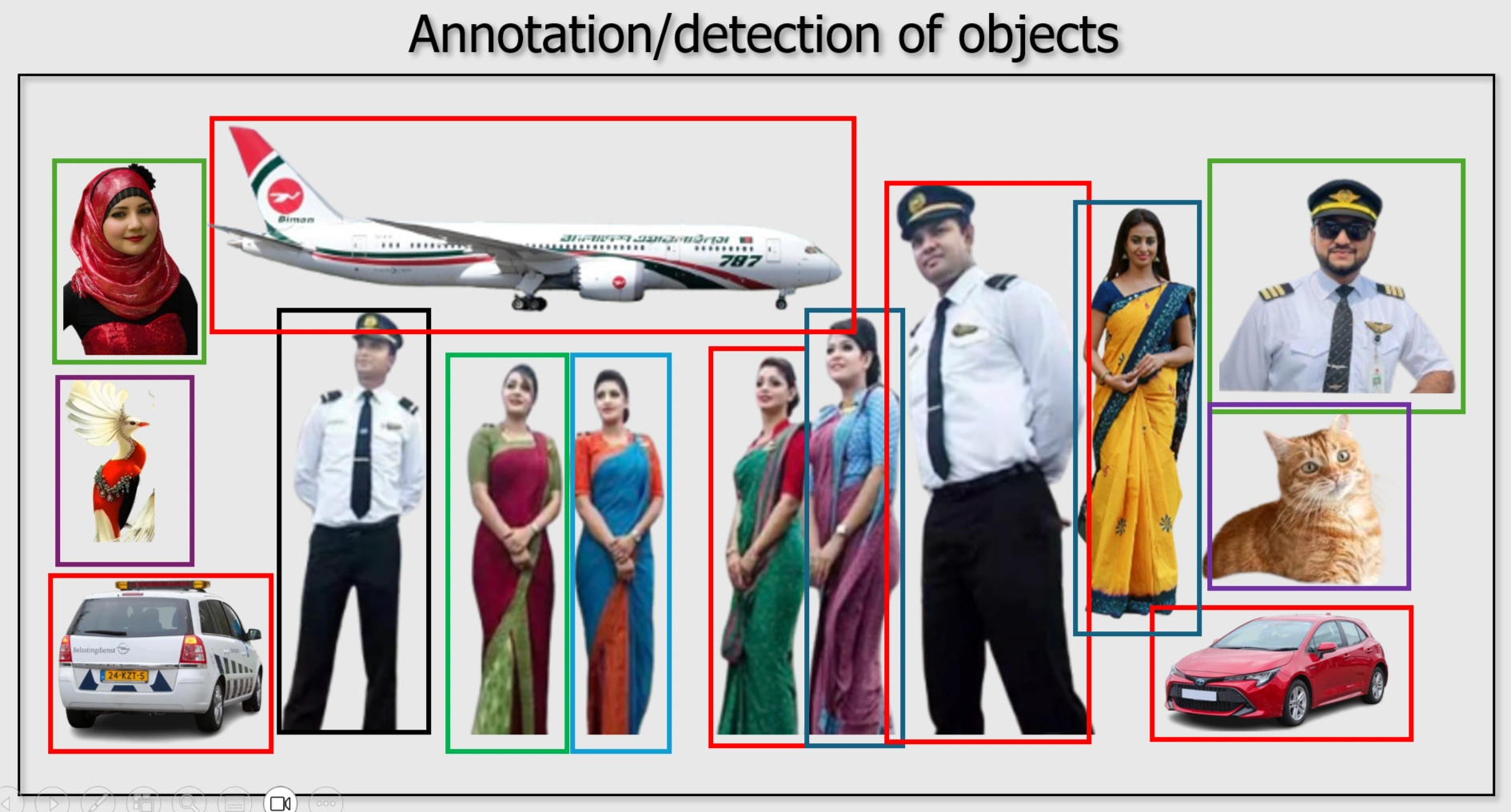
- Explored YOLO (You Only Look Once) for real-time object detection, implementing models to detect
multiple objects in images and videos with high accuracy and speed, including applications
like forest fire and brain tumor detection.
- Trained custom YOLOv12 models using annotated datasets tailored for specific object detection tasks.
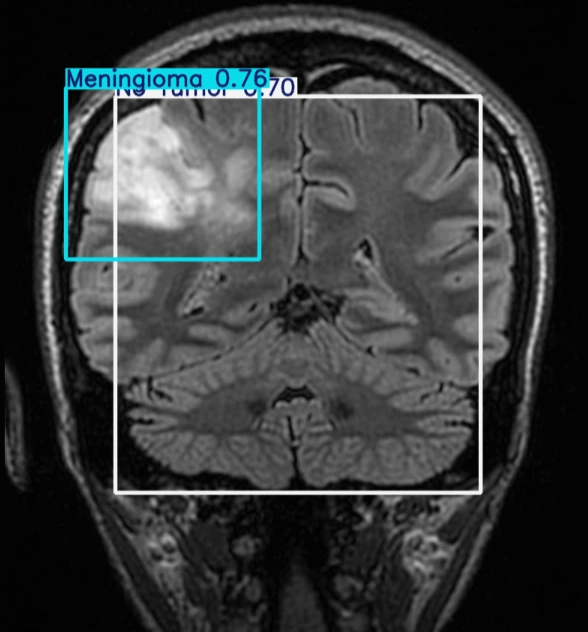
Brain tumor detection using YOLOV12 by M A Hoque
- Optimized YOLO models for real-time performance on low-resource devices by experimenting with
lightweight architectures and pruning for efficient inference on mobile and embedded systems.
- Evaluated YOLO model performance using standard object detection metrics like mAP and IoU
to assess precision and recall.
- Developed a YOLO-based pipeline integrated with OpenCV for real-time surveillance systems,
enabling video streaming and object detection such as car registration number recognition.

Car registration number detection
- Designed a self-driving car simulation using CNNs trained on driving behavior
data to model autonomous navigation in a virtual environment.
- Implemented lane detection and steering angle prediction using CNNs
trained on simulated road images for accurate autonomous navigation.
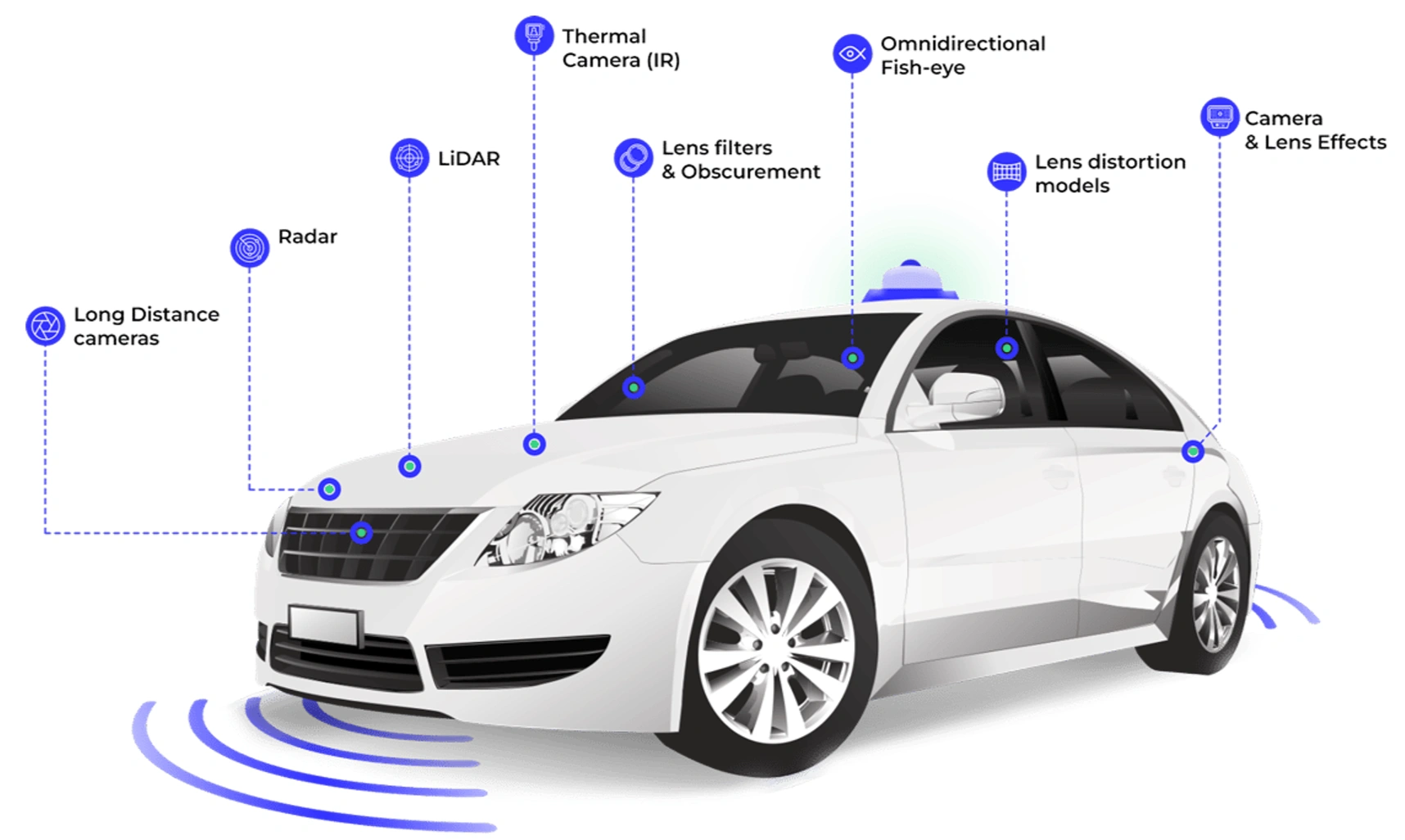
Self-Driving Autonomous Car
- Integrated real-time inference in a driving simulator by deploying trained
CNN models to evaluate performance during live driving scenarios.
- Experimented with end-to-end deep learning for autonomous driving by implementing
neural networks that map raw input images directly to steering commands.
- Conducted performance benchmarking and fine-tuned the self-driving CNN model by adjusting hyperparameters and
architecture to enhance generalization and robustness across diverse driving conditions.

Self-Driving car simulation. Lane detection and steering angle prediction


 www.HoqueAi.com
www.HoqueAi.com